Our Location
1103A Tianhui Building, Yeqin 1st Road, Longcheng Street, Shenzhen, Guangdong, China
1103A Tianhui Building, Yeqin 1st Road, Longcheng Street, Shenzhen, Guangdong, China
Stepper motor drivers are the heart of motion control systems. Choosing between a closed loop and an open loop stepper driver can significantly affect torque performance, accuracy, and system reliability.
In this guide, we compare the two types in detail, helping engineers and buyers select the optimal solution for CNC machines, automation equipment, and robotics applications.
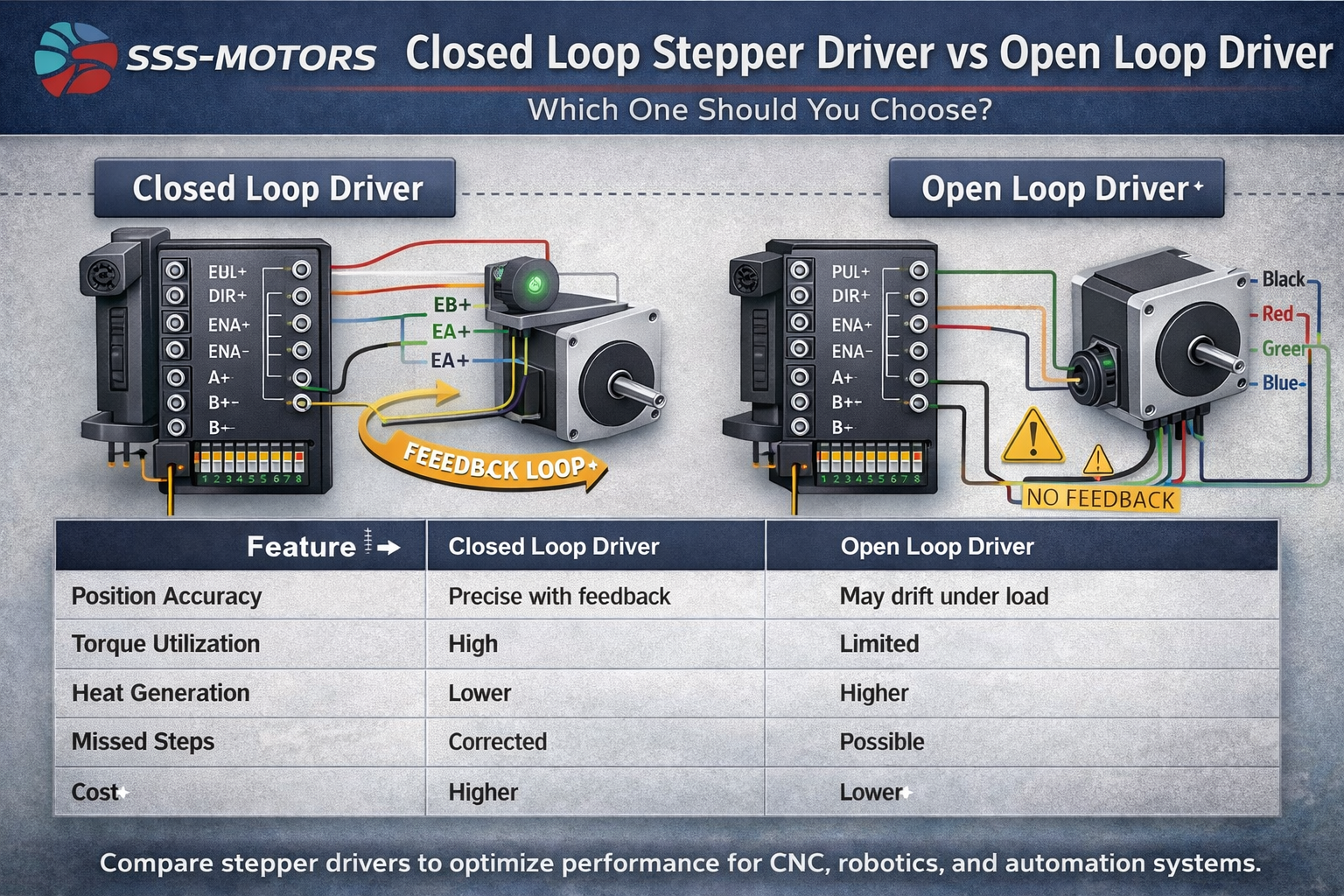
The following infographic provides a visual comparison of Closed Loop and Open Loop Stepper Drivers.
It shows wiring differences, encoder feedback, torque, accuracy, and cost, helping engineers quickly understand which driver fits their application.

Open loop drivers operate by sending step and direction signals to the motor without feedback.
They rely on the motor’s inherent torque to maintain position, which works well in light-load applications.
However, missed steps can occur under high load, leading to positioning errors.
For a complete understanding of open loop stepper motors, check our article:
NEMA 17 vs NEMA 23 Stepper Motor.
Closed loop drivers use encoder feedback to continuously monitor the motor position.
If a step is missed or load changes, the driver instantly adjusts the current to correct the position.
This results in precise motion, higher torque utilization, and reduced motor heating.
Learn more about the advantages of closed loop motors:
Closed Loop Stepper Motor Advantages.
| Feature | Closed Loop Driver | Open Loop Driver |
|---|---|---|
| Position Accuracy | Maintains exact position with encoder feedback | Position may drift under high load |
| Torque Utilization | Higher, even at high speeds | Lower at high speeds |
| Heat Generation | Lower, optimized current | Higher, motor runs hotter |
| Missed Steps | Automatically corrected | Possible under load |
| Cost | Higher | Lower |
| Applications | CNC machines, robotics, automation, high-load systems | Low-load CNC, 3D printers, hobby projects |
This diagram shows the wiring setup for Closed Loop and Open Loop Stepper Drivers, including controller signals, motor connections, encoder feedback, and DIP switch current settings.
It helps engineers wire the system correctly for optimal performance.

For step-by-step instructions, refer to:
Stepper Motor Driver Wiring & Current Setting Guide.
Choose a closed loop driver for applications requiring high accuracy, high torque, and real-time correction such as industrial CNC machines and robotic arms.
Select an open loop driver for budget-sensitive projects or light-load applications where missed steps are unlikely.
For detailed product selection, visit our
Stepper Motor & Driver Products.
If you are unsure which driver to choose for your application, SSS-Motors engineers can assist with motor-driver matching, wiring guidance, and current configuration.
Ensure your system runs reliably and efficiently with the correct choice.